Tiny HAMR-JR Microbot Is One Of The Fastest Microrobots
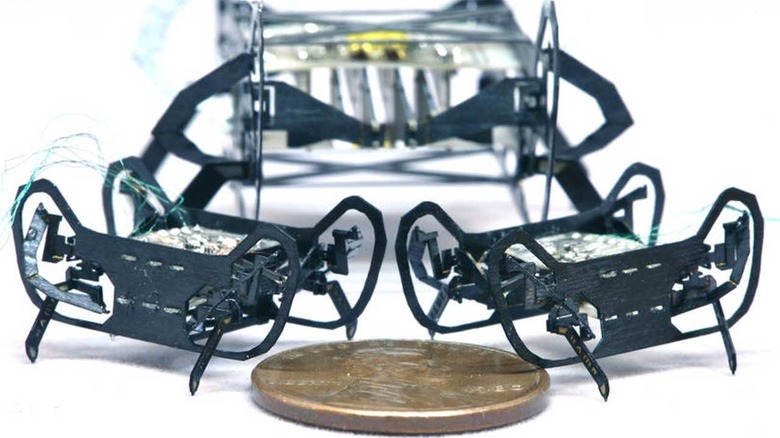
Harvard researchers have created a microrobot they call HAMR-JR that's able to run, jump, carry heavy payloads, and is highly maneuverable. It's a half-scale version of another robot developed at Harvard that was inspired by a cockroach called HAMR. HAMR-JR is about the size of a penny and can perform most of the feats its larger predecessor was capable of, which makes it one of the most dexterous microrobots built to date.
One of the questions the research team was aiming to answer during the project was whether or not the pop-up manufacturing process that was used to build past versions of HAMR and other microbots can be used to build robots at different scales. The team was curious if the process would work for sizes ranging from tiny surgical robots to large-scale industrial robots.
The construction process is called PC-MEMS and is a fabrication process where the components are etched into a 2D sheet and then popped out in its 3D structure. To build HAMR-JR, the team shrunk the 2D sheet design of the robot along with the actuators and onboard circuitry to create a smaller robot with the same functionality. The researcher said that the best part about the exercise was that they didn't have to change anything from the previous design.
HAMR-JR has a 2.25 cm body length and weighs 0.3 g. It's able to run 14 body links per second, making it one of the smallest and fastest microrobots. The team also designed a model that's able to predict locomotion metrics like running speed, foot forces, and payload based on a target size. The model can then be used to design a system with the required specifications.
A Co-author of the paper on the robot, Robert Wood, says that the new robot demonstrates the scientists have a good grasp on the theoretical and practical aspects of scaling down complex robots. The project was supported by DARPA and the Wyss Institute.