Atlas And Valkyrie Robots Navigate Rough Terrain Thanks To IHMC Software
When people talk about robots taking over humans' jobs, they're mostly talking about those robots that come in incorporeal, digital-only form. It's going to be a very long while before humanoid or even bipedal robot can pose a fictional threat to humans. They can't even walk on uneven terrain without toppling over. That has been one of the challenges of DARPA's contests and IHMC Robotics may have developed a way for the likes of Atlas and Valkyrie to learn how to step through treacherous land.
What comes naturally to us humans is, of course, difficult for artificial beings. In addition to fine motor control, we humans have senses and instinct that can easily navigate through the ups and downs of any kind of terrain. Bipedal robots try to replicate the same through various means but IHMC might have hit gold with its new technique.
Previous attempts like those used in DARPA's robotics contest employed a manual operator to lay down each step a robot has to take. That may work on flat surfaces but it can't dynamically adjust to compensate for changes in situation and terrain. It may make for some comic relief in videos but it's a serious problem for robots.
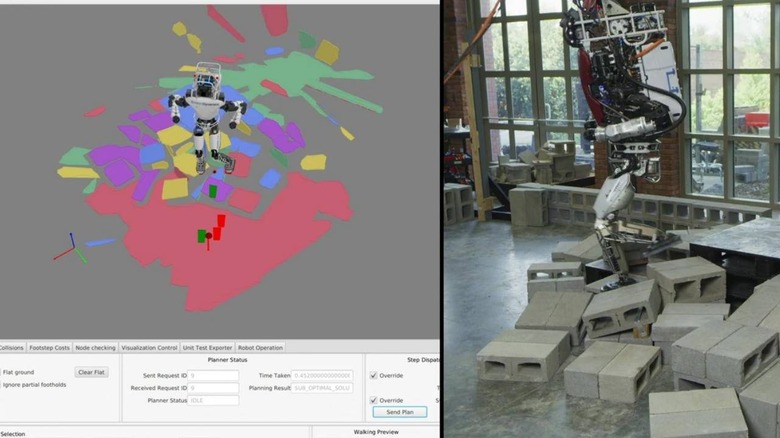
IHMC's new system tries to solve that by detecting the terrain before computing the step the robot has to take in real-time. More importantly, it doesn't plot out the entire path from start to finish but re-evaluates it at certain intervals. This means that it will be able to adapt to changes in the path, like obstacles that may have appeared by accident or intentionally.
IHMC tested the system on Boston Dynamic's Atlas and NASA's Valkyrie with impressive results. It's not perfect yet and has a 50% chance of failing in very narrow terrain. It's still a significant improvement over a manual system that can't compensate for sudden changes that often happen in the real world.