NASA Wants To Explore Distant Ocean Planets With These Robots
Out in the depths of space, in our solar system and beyond, there exist a vast variety of worlds. There are gas giant planets bigger than Jupiter, and extremely hot planets that orbit so close to their stars that a year lasts just a few days. There are ocean worlds, and many moons and bodies that hold intriguing mysteries.
So it stands that agencies are developing ways to explore these places that go beyond the orbital spacecraft or surface rovers that are most commonly used today. Given the importance of liquid water to facilitation of life, one type of world that is particularly interesting to explore to look for potential signs of life are water worlds, which are partially or completely covered in oceans.
But how do you explore an ocean world? You can look from orbit and collect some data that way. That's how the European Space Agency's JUICE mission plans to study the icy moons of Jupiter, and it's how NASA's Europa Clipper mission will study one of those moons in particular. Both are scheduled to arrive in the Jupiter system in the 2030s and should help bring new knowledge about these strange worlds where vast oceans are hidden beneath thick icy shells.
But to get more in-depth information, you need to go deeper — literally. The next phase of robotic research of ocean worlds is the development of underwater explorers. That's what NASA and other space agencies are working on right now.
Why go underwater?
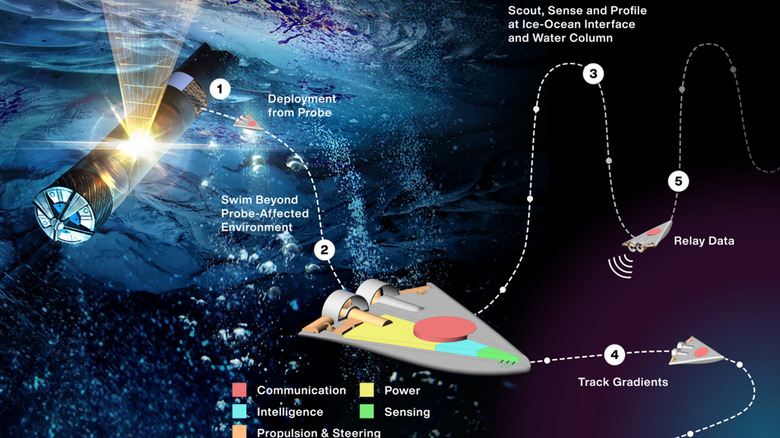
NASA is working on a mission concept called SWIM, or Sensing With Independent Micro-swimmers. The idea is to develop a whole swarm of underwater robots that can work together to explore large areas. Each robot would be tiny — about the size of a mobile phone — and would be able to propel itself through the water to seek information.
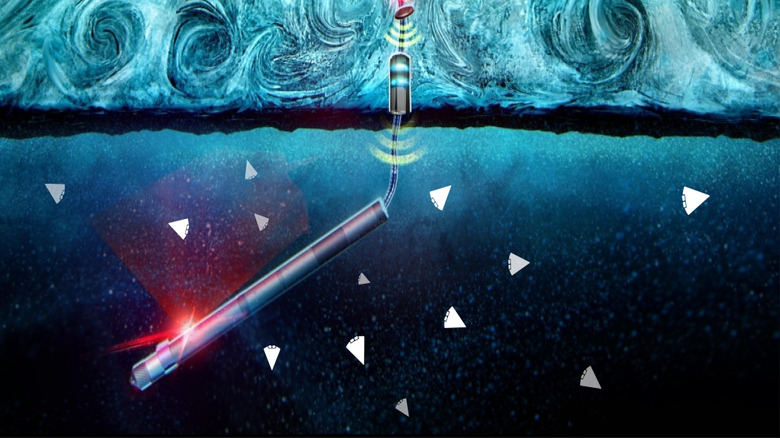
And as for those icy crusts which exist on many water worlds, SWIM would include a larger ice-melting robot that would land on the ice crust, bore a hole in the ice, and then deliver the smaller swarm robots.
"People might ask, why is NASA developing an underwater robot for space exploration? It's because there are places we want to go in the solar system to look for life, and we think life needs water. So we need robots that can explore those environments — autonomously, hundreds of millions of miles from home," explained Ethan Schaler, principal investigator for SWIM at NASA's Jet Propulsion Laboratory.
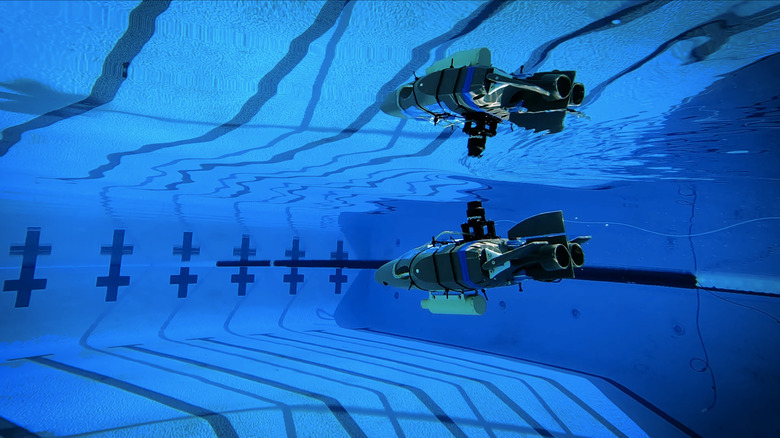
The robots are developed enough that a prototype has already been tested in underwater conditions here on Earth. A video from NASA shows a prototype made using 3D-printed and commercial parts being tested in a 25-yard swimming pool at Caltech University. The robot is autonomous, enabling it to be directed and move as needed, and early results are promising.
Working autonomously
The current design for the robot is relatively simple, using off-the-shelf parts that are not expensive and therefore easy to experiment with. The robot has two propellers to maneuver it through the water, along with four flaps to help guide it in the right direction.
Much of the development is focused on the software, which allows the robot to explore autonomously. Current examples like the Perseverance rover on Mars operate with autonomous driving, while the Mars helicopter Ingenuity made use of autonomous flight. This is important not only because humans can't see what obstacles these explorers might be facing, but also because of the communication delay between Earth and these distant worlds. Real-time driving is impossible, so the robots have to be able to steer themselves.
In the case of the SWIM robots, the prototype tested was able to stay on an assigned course and correct it as needed, and to perform a preset exploration pattern, all autonomously. In case of trouble, however, there was an engineer on hand with a fishing net ready to scoop up the robot if it got into difficulties.
"It's awesome to build a robot from scratch and see it successfully operate in a relevant environment," Schaler said. "Underwater robots in general are very hard, and this is just the first in a series of designs we'd have to work through to prepare for a trip to an ocean world. But it's proof that we can build these robots with the necessary capabilities and begin to understand what challenges they would face on a subsurface mission."
Developing the concept for the future
The prototype robot is around three times larger than what is planned for the mission, so there is a lot of work to do to make it more compact. Also, anything that is sent into space, especially an explorer that will be out of Earth's orbit and impossible to repair, needs to be made using space-ready parts. That means that spacecraft are generally assembled using specially-made components, which are more durable than anything available commercially. They need many backups to act as redundancies if any part of the hardware fails.
There's also the problem of how the robots will communicate from underwater. The plan is to use a wireless underwater acoustic communication system, which will allow each robot to send data to its fellow swarm members and to work out its position. Software that allows a swarm to act cohesively is also in development, with computer simulations being used to complete algorithms for efficient exploration.
And of course, there's the need to collect scientific data during all of this exploration, so engineers at Georgia Tech in Atlanta are working on a single sensor, which can detect factors like temperature, pressure, chemical makeup, and more, to learn about the ocean environments on other worlds. The SWIM concept is currently under development as part of NASA's Innovative Advanced Concepts (NIAC) program.